Waseda Micro Mouse
Fall 2023-Present
I'm currently working on a maze-following robot as part of Waseda's micro mouse club. This robot is fully soldered together by me. The code to run it is a C++ codebase with Japanese comments.
So far I've been able to:
- Build the robot ~3 weeks
- Set up the dev environment ~2 weeks
- Deploy modified code on to the robot
- Properly calibrate IR sensors with the help of a command-line utility
Now i'm working on:
- Refactoring the code to modern standards
- Getting the robot through a complete maze
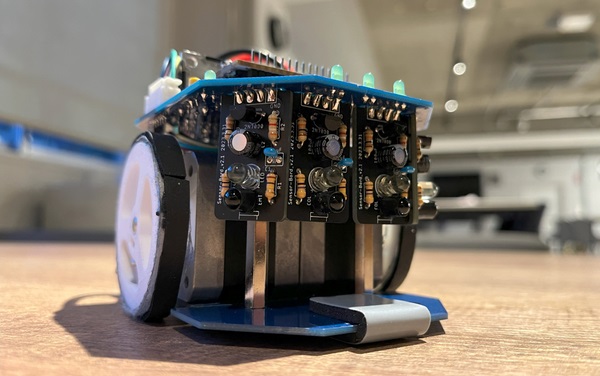
Front view
IR Demo